Force Calculations and Accelerometer Testing
- Kevin Matthew Mukalel
- Jan 16, 2022
- 2 min read

Bike crashes are difficult to predict due to the variety of factors that are in play including terrain, speed, and angle of fall. To help get an informed estimate of the forces and accelerations we needed to measure we referred to helmet test data from the Consumer Protection Safety Commission (CPSC) and a study on concussive accelerations from the Journal of Athletic Training to come up with the following assumptions.
In typical road or trail crashes, there is a drop to pavement and the main energy for the impact is due to gravity. Thus at low speeds, impact velocity is approximately 5.425 m/s.
Based on our potential mTBI threshold value of 80g’s, the helmet impact would be around 400N.
To measure the calculated force, the two different force sensors listed below were considered. The capacitive force sensor can measure up to 450 N and has a response time of < 1ms. The flexiforce sensors are cheaper, measure up to 445 N and have a much quicker response time ideal for our application. The sensitivity through the shell of the helmet is something we will be testing.
Due to the cost being cheaper and a faster response time, we ended up selecting the flexi-force sensors.
Since we wanted to measure the accelerations we looked at the first 3 imu boards listed early on in our design process, but the minimum threshold we found invalidated their use.
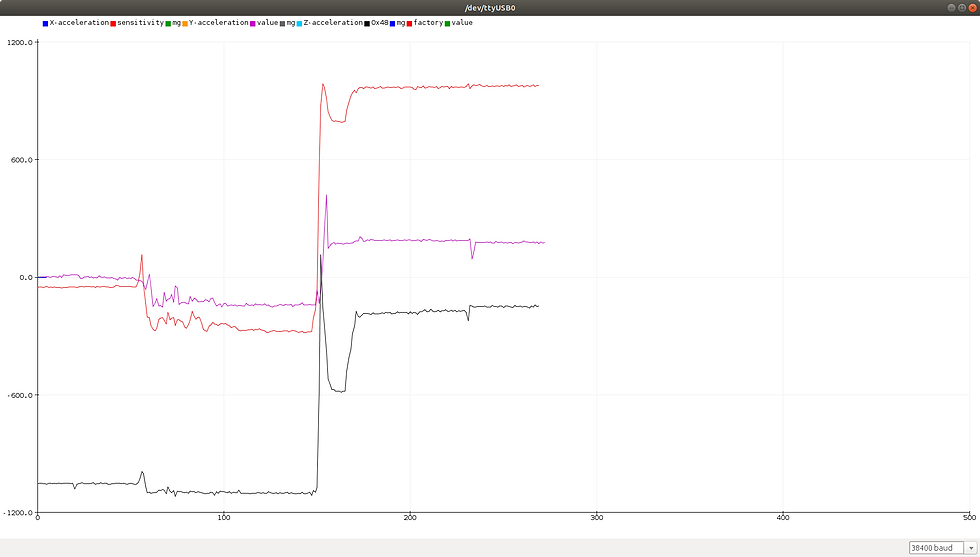
For example, take two accelerometers that are placed on the left and right side of the helmet with their axes mirrored such that the positive z axis for the left accelerometer was in the left direction and vice versa for the z axis of the right accelerometer. If the helmet was then dropped on the floor with the left side facing down, the resultant data will show that the left-side accelerometer will have negative spikes in the z-component whereas the right-side accelerometer will see the same magnitude of spike in the positive z direction.
From knowing the way the accelerometers were placed, it is obvious that the accelerometer showing the negative acceleration in the z-component is the location of impact because the acceleration vector is going towards the center of the helmet. Logically this makes sense as at the time of impact the helmet will stop accelerating downwards due to gravity and quickly experience upwards acceleration as it comes to a stop or bounces. All sides of the helmet experience the upwards acceleration, but due to the accelerometers’ axes being oriented such that they are mirrored, only one will show acceleration towards the center of the helmet which is also opposite the direction of original travel.
As such, if an algorithm can be developed to determine which accelerometer (out of many placed around the surface of the helmet) experiences the peak acceleration vector, the impact location will accurately be known.



Comments